
今日は晴れ時々曇りで、昨日よりは透明度が高い空でした

月がだいぶ明るくなって3等星くらいまでしか見えません
さて今日はSynscanのオートアラインシリーズ2回目、メニューの機能を備忘録として説明しておきます
SynScanのアライメントページからオートアライン(正式にはSynMatrixAutoAlign)を選択すると下のような画面になります
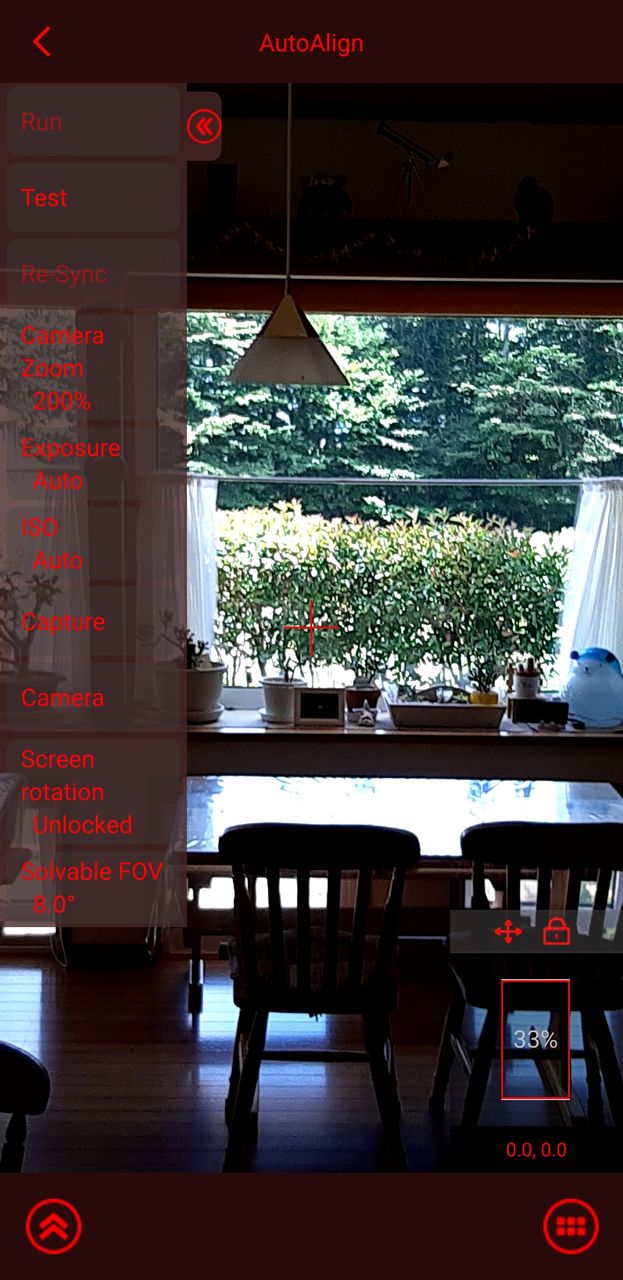
架台がWi-Fi接続されていれば左サイドのメニューが全てアクティブになります
(ここではRunとReSyncがアクティブでないです)
全てがアクティブになった状態で「Run」をタップすると
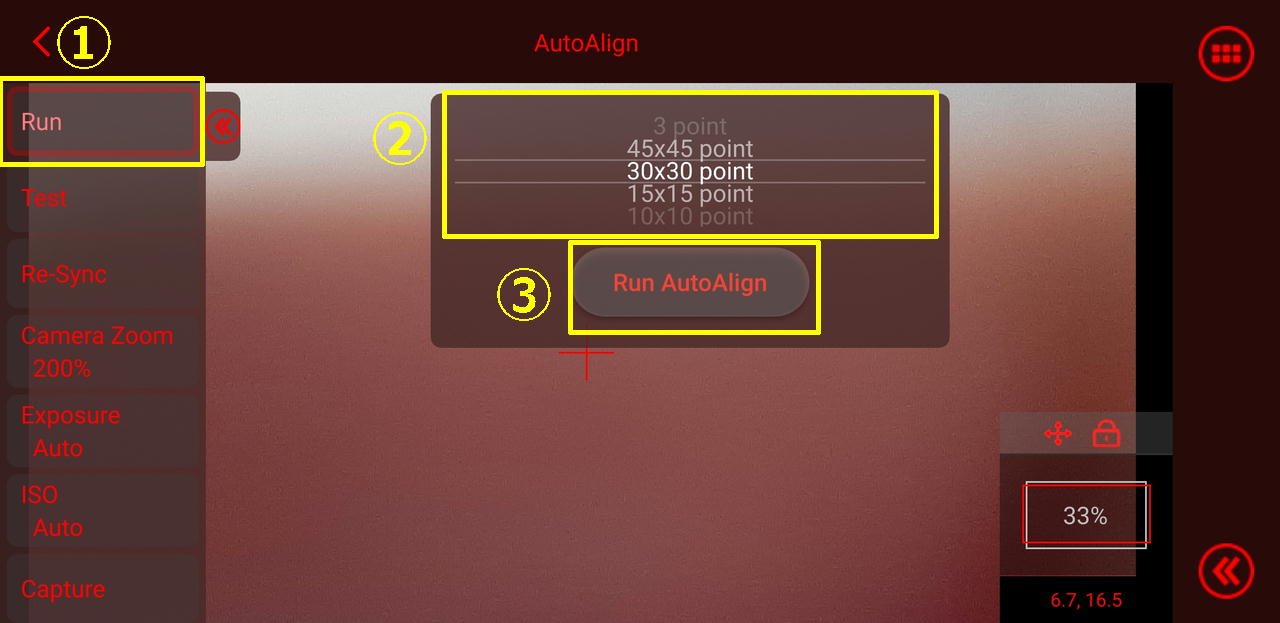
アライメント方式のメニューが表示されます
見慣れた2ポイントや3ポイントのほか45x45pontや30x30pointoなどが表示されます
まだ45x45pointなどの意味や使い方がわかっていないので追々調べたいと思います
「Test」をタップするとスマホのカメラが星空を撮影してプレートソルブがおこなえるかどうかを確認するようです

まだ実天で試していないのでどのような動作になるのか確認できていません
「ReSync」はアライメントの同期を再設定する機能かと思いますが、・・・

こちらもまだ実天で未確認です
「CameraZoom」はスマホカメラのズーム倍率を設定します
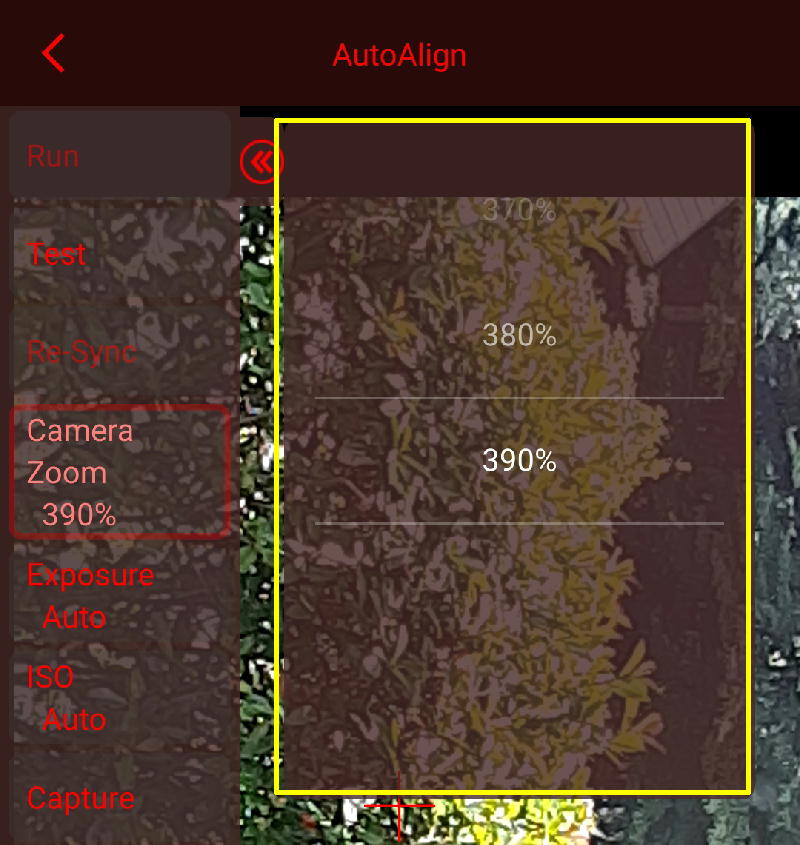
機種依存で最大ズーム倍率が変わるようです
精度の良いアライメントのためにはズーム倍率が高い方が良いかも知れませんが、これもまだ未確認です
「Exposure」はカメラの露光時間です
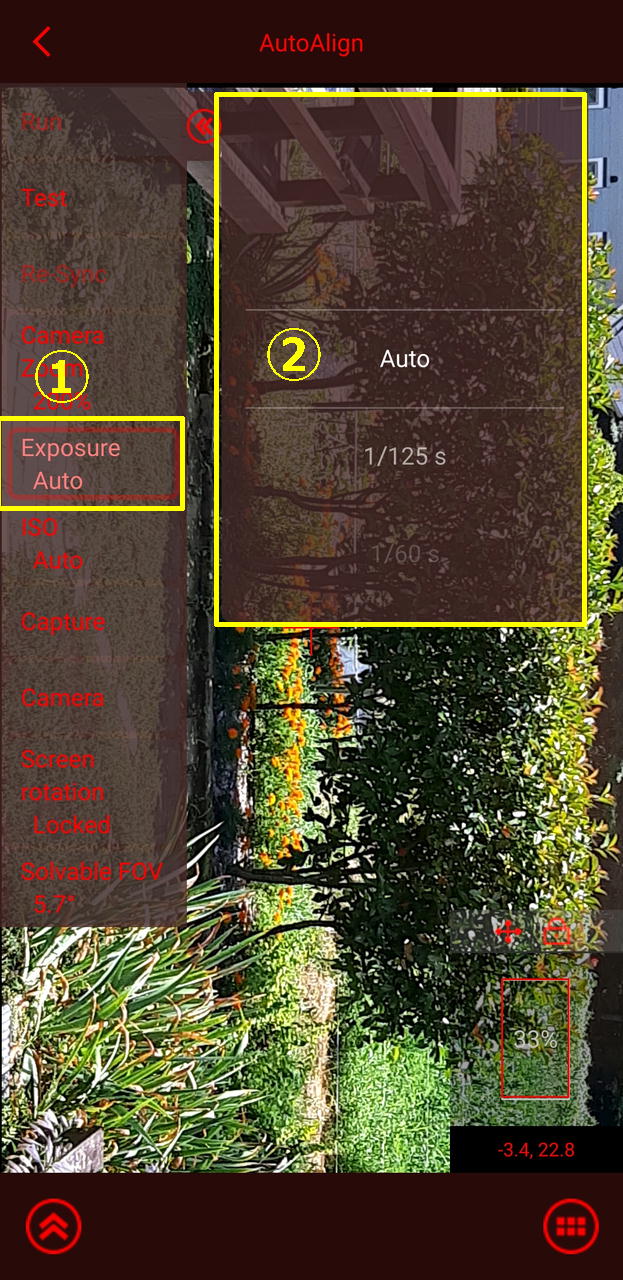
機種依存で最長露光時間が変わる(または設定できない)ようです
オートでも良い気もしますが、星を撮影してプレートソルブが出来るようにするには1~2秒の露光時間が必要な気がします
「ISO」はカメラのISO感度設定です
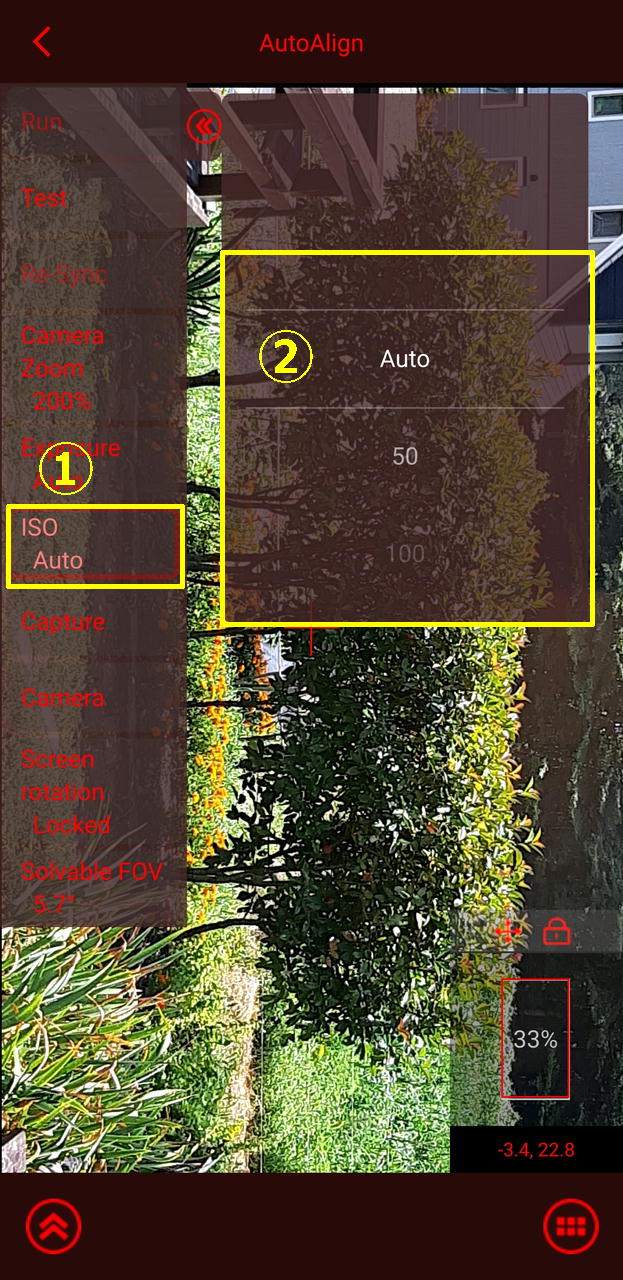
こちらも機種依存で最大ISOが変化します
こちらオートで良いのかも知れないのですが星の撮影にはISO1600くらいは必要かも知れません
「Camera」はプレートソルブに使用するカメラの選択です

スマホでプレートソルブまでやるのでスマホのカメラ択一です
(PCアプリで制御する場合などを考慮してのメニューのようです)
「Screenrotathion」はスマホが回転してもメニューや画像が回転しないように画面をロックします

経緯台での運用では必要ないかも知れないですが、赤道儀での運用では必須になります
「SolvableFOV」はプレートソルブを行うための星の位置のデータベースです
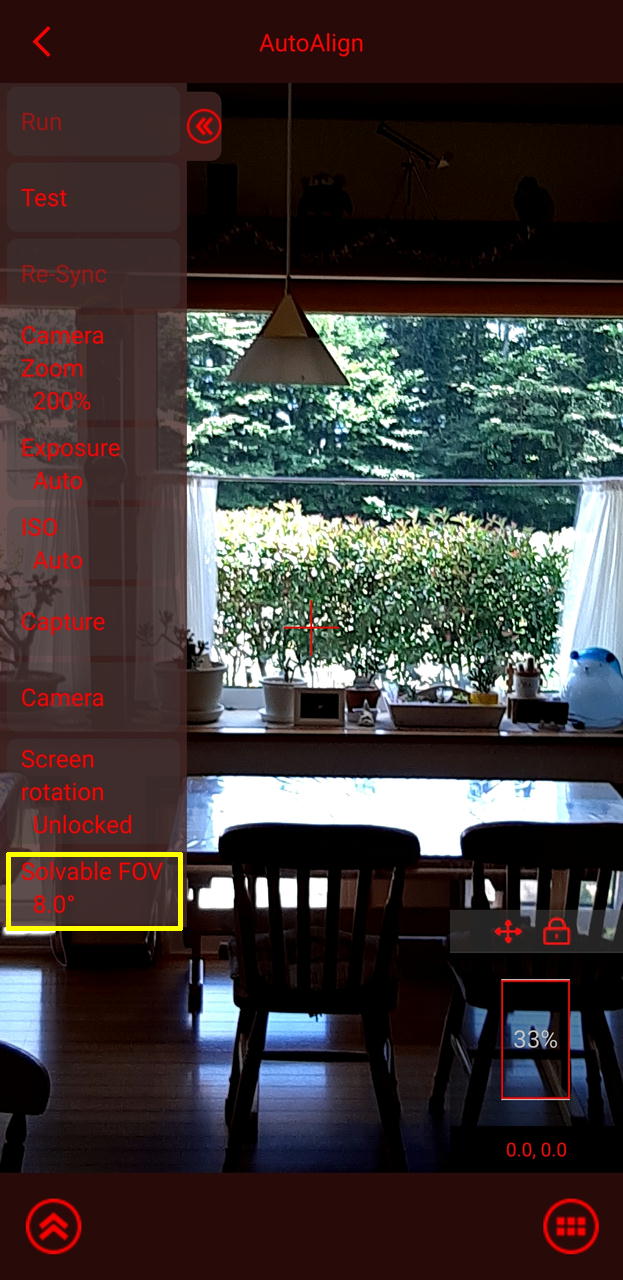
デフォルトでは8°までの角度で全天をカバーしたデータベースを使用してプレートソルブを行うようになっています
このボタンをタップすると・・・

使用しているデータベースが表示され、さらに細かい角度のデータペースもダウンロードできるようになっています
スマホカメラでの位置合わせであればデフォルトのままで充分なのかも知れませんが、さらに細かいデータが必要かなどの情報がどこにもないのが現状です
とりあえずオートアラインのメニューを把握しましたのであとは晴れて実天で確認したいと思います