
今日は雨降りなスタパ周辺。
さて昨日の記事でAM5を用いて「お気楽ハイブリッド観察」をするという紹介をしました。

何気なく紹介している感じですが、実はここ10年ぐらいの間に急速に技術がこなされてきて、革命的とも言える進化を遂げた3つの要素の集大成とも言えるものなのです。
今日はこの3つの革命的的技術について紹介したいと思います。
まず第1の革命はCMOSカメラの進化です。
20年くらい前からデジタルカメラが急速に普及し、フィルムカメラが駆逐されてしまいましたが、このデジタルカメラでさえスマホの付属カメラの普及と進化によりかなり追い詰められています。
一方では監視用や工業用カメラ向けのCMOSセンサーが急速に進化し、超高感度が求められる特性が天体撮影用にも好適である方向に進化しました。
パソコンとの親和性も良く多数の画像をリアルタイムに重ねあわせるライブスタック処理ができるようになったことで、観察しているその場で暗い天体を映し出せるようになったのです。
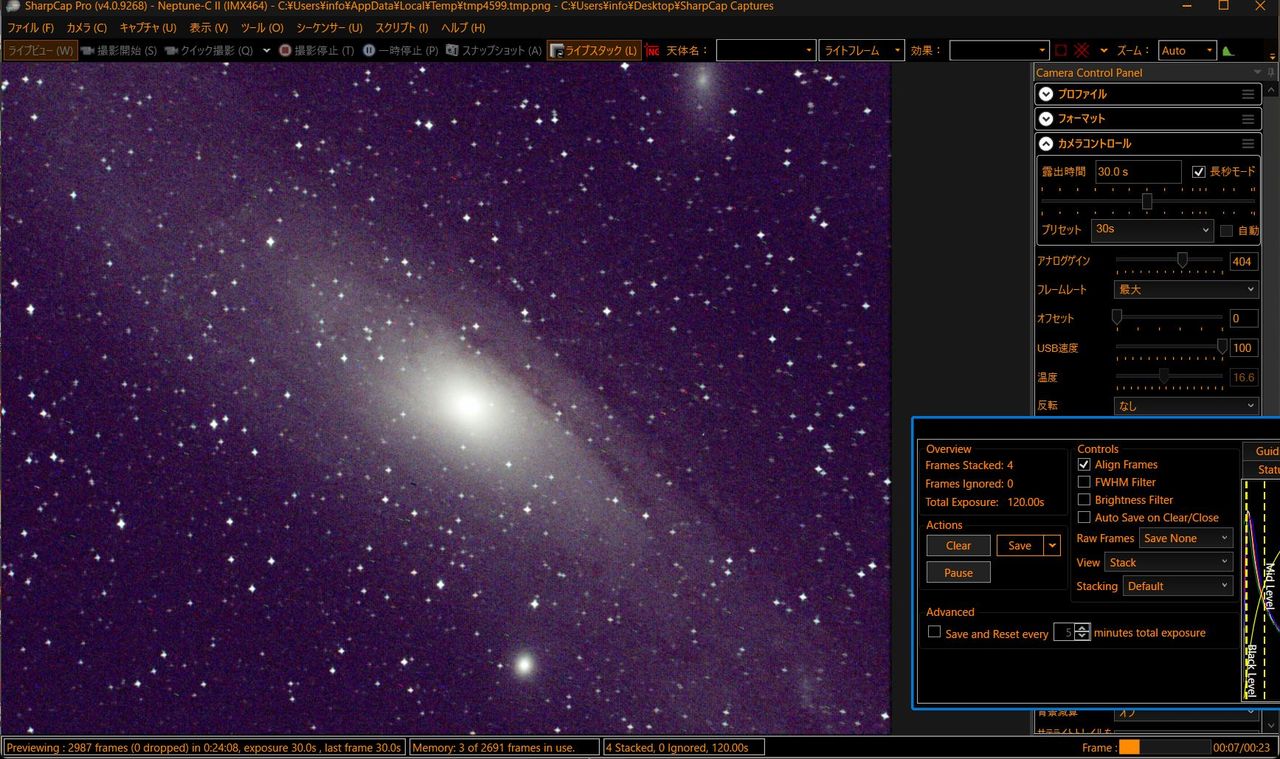
画像処理技術の進化によりバックグラウンドの明るい都会でもコントラストを高めて、これまででは得られないような天体の画像が撮れるようになりました。
人工光を抑えつつ天体の出す光だけを選択的に通す干渉膜フィルターの開発と合わせ、従来では信じられないほどの天体画像が得られるようになったのです。
画像処理のアプリケーションもドンドン進化していて、初心者でもそんなに苦労しないで鮮明な天体画像が得られやすくなっているのも大きなポイントです。
第2の革命はプレートソルビングによる自動導入です。
自動導入そのものは民生用でも40年近く前からあるのですが、これまではメカ式のものが主流で、事前にかなり精密に機器の設置をする必要がありました。
それでも100倍くらいになるといつもピタリと中央に導入できるわけではなく、何とか視野内に捉えられるというのが実状でした。
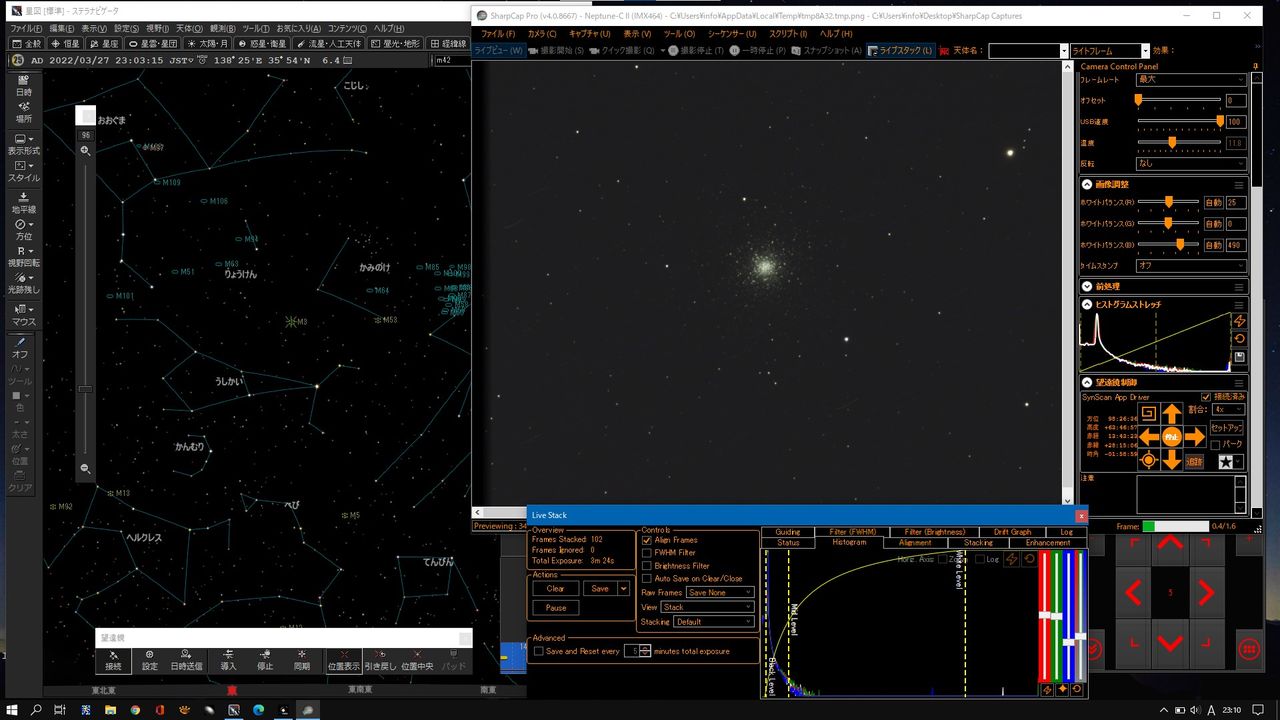
プレートソルビングというのはCMOSカメラとの組み合わせにより、今向いている空を撮影→解析して今どこを向いているか判断したうえで、自律的に望遠鏡を動かし所望の天体を導入するという技術です。
数瞬のうちに全天の星の配列の中から向きを解析して所望の位置まで望遠鏡を向けるわけです。
メカ式の自動導入のときのように精密な機器の設置(=初心者にはハードルが高い)をしなくても何とかなってしまうのがプレートソルビングなのです。
そして第3の革命はバランスウエイトレスの赤道儀です。

これまで赤道儀を使うときにはバランスウエイトを用いての調整が必須でした。
きちんと調整をしないと思わぬ動きをして危険でしたし、精密な天体の追尾のためには精密な調整が不可欠だったからです。
バランスウエイトレスの赤道儀は近年急速に進化した工業用ロボットの駆動装置を応用したものです。
工業用ロボットの関節部分にはバランスウエイトが使われていないのですが、これにはハーモニックドライブという措置が用いられています。
ハーモニックドライブ自体はそれほど高精度ではないのですが、構造的にバックラッシュ(ギアのかみ合わせで発生するガタ)がほとんどありません。
このため細かな調整ができる制御装置と組合わせればかなり高精度の運用ができるのです。(ガタがないので微調整が容易です)
高精度な赤道儀として用いるにはCMOSカメラとパソコンを組合わせて精密な追尾やプレートソルビングを行うことが前提の装置と言えます。
従来この辺の技術(オートガイドやプレートソルビング)も初心者にはハードルが高かったのですが、AM5では同じくZWO社のASIAIRとCMOSカメラを組合わせることによりかなり簡単に精密な制御ができるように工夫されています。
(天邪鬼な私はまだ使っていませんが追々と・・・)
もちろん制御装置と組合わせなくてもお気楽観察として使用するぶんにはまったく問題なく使用できます。
バランス調整の必要が全く不要というのも、使い出すと想像以上に気楽で初心者には優しいです。
AM5の場合、最大同架加重が20kgで10kg以上はバランスウエイトの使用が推奨されているのですが、実はこれすらも純正三脚との組み合わせで転倒を防止するためで、転倒の危険性がない三脚を用いればウエイトなしでも問題無いように作られているようです。
AM5と純正三脚を組合わせた重量は8kg弱、下手をすると従来赤道儀のバランスウエイトのみの重量なので、運用上もとても楽です。
今後この3つの革命がどんなふうに進化して行くか、新たな革命的変化が産まれるのかとても楽しみですね。
AM5も導入されたのですね。(理想的な環境で羨ましいです)
Windowsで制御となるとCOM部分(ASCOM部分)の安定度が如何ほどかですね。。。
早くTCP-IPベースのAlpacaが普及してほしいです。
T-Studioさま
確かにSharpCapは今のところ問題無いですが、AM5ではステラリウムがよく落ちます。
落ちたりフリーズしたときは立ち上げ直せば位置情報なども復帰するので実害はあまりないのですが、気が急いているときに立ち上げ直すのは煩わしいですね。
素直にラズパイベースのASIAIRを使うのが幸せかも知れません・・・
オーナー様、
AM5、これはユーハン工業のT-REX経緯台の赤道儀板と言った感じですね。
赤道儀のネックといえばやはりバランスウエイト。中型機までならばウエイトが要らないと言う事は何よりの利点です。
C11での眼視のみならば、ウエイト無しではギリギリか、ややきついかなと言うところでしょうか。
小澤さま
T-REX経緯台がどのような機構を用いているか知らないのですが、AM5はいわゆるハーモニックドライブと呼ばれるバックラッシュゼロのメカニズムになっているそうです。
三脚が転倒の心配さえなければ20kgでもウエイトレスで使えるそうです。
オートガイドを組合わせても追尾精度は2秒くらいまでしか保証されていないので撮像素子のピクセルサイズにもよりますが長時間露光に絶える焦点距離は900mm程度のようです。
とは言えシュミカセは星像が甘いのでレデューサーを組合わせたC11なら何とかなりそうな気もしています。
今後、いろいろ試して見たいと思っています。